Conclusão:
O projeto do robô gladiador, ao todo, foi muito divertido de se fazer, aprendemos sobre setores da física que nem imaginávamos que poderíamos por em prática, como o conjunto de circuitos e resistores.
Apesar dos contratempos e das dificuldades enfrentadas pelo nosso grupo; Conseguimos nos superar a cada etapa e sempre nos dias de teste, apresentamos um dos melhores números de tempo, como o teste do oito, assim como também, no dia da competição, onde ficamos em 2° lugar no rankin da sala, nos candidatando a disputar com os outros terceiros anos.
As disputas feitas em sala de aula nos cativaram o interesse por sempre querer ser o melhor, e não desistir quando se encontra um problema, mas sempre continuar em frente, aprendemos que a única luta que se perde é aquela que se desiste, e o grupo 2 não desistiu em nenhum momento.
quinta-feira, 31 de outubro de 2019
Em sala de aula o Professor Maurício pediu para que preenchêssemos um questionário sobre o robô e a função de cada integrante do grupo, lembrando que o robô do grupo já estava montado devido ao adiantamento dos integrantes.
Na parte elétrica do projeto:
Rafael Washington n°31, Luccas Rafael nº23
Na parte mecânica: Gabriel Vilela nº15, João Pimenta nº20 e Rafael Washington nº31
Outros: Wagner Guerreiro nº39 ficou responsável por fotografar as imagens do passo a passo do projeto e as postagens no blog.
O grupo não comprou o Kit do robô assim então procuramos as peças necessárias por lojas de eletrônicos gastando em torno de R$ 15,00.
Na parte elétrica do projeto:
Rafael Washington n°31, Luccas Rafael nº23
Na parte mecânica: Gabriel Vilela nº15, João Pimenta nº20 e Rafael Washington nº31
Outros: Wagner Guerreiro nº39 ficou responsável por fotografar as imagens do passo a passo do projeto e as postagens no blog.
O grupo não comprou o Kit do robô assim então procuramos as peças necessárias por lojas de eletrônicos gastando em torno de R$ 15,00.
quarta-feira, 23 de outubro de 2019
Ontem 22 de outubro foi realizada a competição do projeto. O robô do grupo foi classificado, após algumas batalhas, em segundo lugar.
O desempenho durante as batalhas foram pergeitos, em momento algum o robô deu indicativa de falhas de comandos. O único ponto negativo foi o fio que acabou por ficar um pouco curto, mas isso foi compensado ao poder andar em volta da arena.
Agradecimentos ao nosso piloto, Rafael Washington.
O desempenho durante as batalhas foram pergeitos, em momento algum o robô deu indicativa de falhas de comandos. O único ponto negativo foi o fio que acabou por ficar um pouco curto, mas isso foi compensado ao poder andar em volta da arena.
Agradecimentos ao nosso piloto, Rafael Washington.

Com a base do robô feita dentro das medidas requiridas para a competição foi montado a base desse modo.

Em seguida foi construído uma peça de encaixe para o robô que é onde será fixado o motor para as rodas e o local onde irá a bexiga.

Assim o robô ficará com todas as partes físicas montadas. Posteriormente a roda foi modificada para que ficasse com melhor acabamento e aderência.


Assim ficou o robô ficou nomeado então de Howlling ‘Rage. Depois de feito alguns testes constatou-se que o carrinho está apto para a competição.
terça-feira, 15 de outubro de 2019
Hoje na sala de aula foi realizado o teste do 8 com o robô, teste esse qm que o piloto do carrinho deve “desenhar” um oito passando por dois obstáculos. Nosso grupo atingiu a marca dos 7,13 segundos ficando em segundo lugar em questão de tempo.
Esse teste serve para ver a habilidade que o controlador do robô tem para o dia da competição e também verificar se o robô está apto, uma vez que nesse teste ele deverá usar a maioria dos comandos.
Esse teste serve para ver a habilidade que o controlador do robô tem para o dia da competição e também verificar se o robô está apto, uma vez que nesse teste ele deverá usar a maioria dos comandos.
sábado, 28 de setembro de 2019

Comparando o desenho do projeto com o que será feito para realizar a montagem.

Foi aberto o controle para a manipulação interna do mesmo. Na imagem está sendo mostrada a tampa superior do controle com o botão liga e desliga geral do controle.

Na tampa inferior do controle verifique as melhores posições para ser colocado a bateria. (Muito provavelmente necessitará do uso de um alicate de bico para “limpar”, retirar certas estruturas internas para tal encaixe)

No projeto original do controle o local onde estariam os triggers ou gatilhos no projeto do controle do robô foi adaptado para o encaixe dos botões que serão usados para a movimentação do robô. Neste caso foi utilizado uma faca quente para abrir os buracos para facilicar o encaixe. Após isso foi realizado as soldagens dos fios internos que ligam as bateria ao sistema inteiro como no desenb do projeto.

Para melhorar o visual do controle foi decidido remover os buracos da tampa superior. Para isso foi utilizado uma tela de arame — do tipo de tela para previnir a entrada de insetos na residência — e ferro de solda para a fixação do metal no plástico. Após esse procedimento foi aplicado massa plástica e depois lixado para remover o excesso.

Para dar um melhor acabamento na superfície utilize uma lixa d’água 2000.

Corte o excesso dos fios internos e depois solde os fios que saem do botão no fio que será ligado nos motores.




Este é o resultado final do controle já ligado aos motores do carrinho. Lembrando que o botão direito do controle controla o motor direito no carrinho, sendo ligado para baixo o carrinho deverá ir para frente, no meio deverá ficar parado e quando estiver ligado para cima o carrinho dará a ré.
sexta-feira, 13 de setembro de 2019

Este aqui é o projeto do controle com o desenho original e com suas devidas ligações. Cada bateria ficara de lados opostos para que o peso do controle na mão do controlador fique, desse modo, mais equilibrado e confortável. As baterias usadas são de 9v com um botão de segurança liga e desliga no meio do circuito. Os botões na frente são para o funcionamento e direcionamento do robô, sendo os dois botões ligados para baixo para ir para frente, no meio parado e ligado para cima para trás. Se invertermos as ligações o carrinho irá para o lado esquerdo ou direito. O fio de quatro vias usado tem 1,5 metros de distância, mas pode ser usado 2 metros para melhor mobilidade.
segunda-feira, 2 de setembro de 2019
Materiais usados:

Será necessário uma rodinha de móveis como a da foto para que a direção do carrinho seja facilitada.

Será usado também um botão gangorra de três posições.
Um botão liga e desliga entrará para complementar o circuito geral do carrinho como uma chave de segurança e controle da bateria.

Será necessário também uma carcaça de controle de Xbox para o controle do carrinho.

2 motores de impressora de 12 volts com eixos alongados e emborrachados. (Os motores da foto teve seus eixos alongados a partir de um tubo de caneta sem tinta, adicione a lista portanto uma caneta pois usaremos ela inteira. Após alongar o eixo com o tubo onde vai a tinta revista-a com um garrote para que tenha a aderência correta para girar a roda).

Para as rodas serão necessários dois CDs, os da foto foram emborrachados com mangueira de soro para criar a aderência com o chão, o solo em que o robô atuará. Para os eixos foram usados dois palitos de unha devido o seu atrito que em comparação com outros materiais foi o menor. Para fixar os dois foi usado uma tampinha de garrafa com um furo no meio para que este palito passasse justo, após isso foi usado cola quente para a fixação de tudo. (Obs: lixe a superfície do CD em que será usado a cola quente).
Esse foi o modo mais bem sucedido do carrinho, pois antes usamos eixos curtos demais e o carrinho não ficava estabilizado, e a cada movimento havia uma enorme chance de quebrar. Essa foi uma solução exata para os problemas.
Após esse processo os eixos foram fixados em uma pequena argola de plástico, mas que pode ser feita também usando arame. Como mostra na foto abaixo:

Retorcendo o arame será possível criar está argola para que segure o eixo no lugar.
Também será necessário papelão e fios para que seja feita tanto o robô quanto a parte elétrica que o complementa. Isso não foi medido pelo grupo.

O tubo da caneta será usado para que o fio que ligará o carrinho ao controle saia para cima, assim evitando que o robô, ao se movimentar, não arraste o fio no chão e passe as rodas por cima.

Será necessário uma rodinha de móveis como a da foto para que a direção do carrinho seja facilitada.

Será usado também um botão gangorra de três posições.
Um botão liga e desliga entrará para complementar o circuito geral do carrinho como uma chave de segurança e controle da bateria.

Será necessário também uma carcaça de controle de Xbox para o controle do carrinho.

2 motores de impressora de 12 volts com eixos alongados e emborrachados. (Os motores da foto teve seus eixos alongados a partir de um tubo de caneta sem tinta, adicione a lista portanto uma caneta pois usaremos ela inteira. Após alongar o eixo com o tubo onde vai a tinta revista-a com um garrote para que tenha a aderência correta para girar a roda).

Para as rodas serão necessários dois CDs, os da foto foram emborrachados com mangueira de soro para criar a aderência com o chão, o solo em que o robô atuará. Para os eixos foram usados dois palitos de unha devido o seu atrito que em comparação com outros materiais foi o menor. Para fixar os dois foi usado uma tampinha de garrafa com um furo no meio para que este palito passasse justo, após isso foi usado cola quente para a fixação de tudo. (Obs: lixe a superfície do CD em que será usado a cola quente).
Esse foi o modo mais bem sucedido do carrinho, pois antes usamos eixos curtos demais e o carrinho não ficava estabilizado, e a cada movimento havia uma enorme chance de quebrar. Essa foi uma solução exata para os problemas.
Após esse processo os eixos foram fixados em uma pequena argola de plástico, mas que pode ser feita também usando arame. Como mostra na foto abaixo:

Retorcendo o arame será possível criar está argola para que segure o eixo no lugar.
Também será necessário papelão e fios para que seja feita tanto o robô quanto a parte elétrica que o complementa. Isso não foi medido pelo grupo.

O tubo da caneta será usado para que o fio que ligará o carrinho ao controle saia para cima, assim evitando que o robô, ao se movimentar, não arraste o fio no chão e passe as rodas por cima.
terça-feira, 27 de agosto de 2019

Hoje, 27 de agosto de 2019, foi realizado na aula o aprendizado sobre circuitos elétricos. E foi discutido também sobre o Robô Gladiador.
Na foto acima está o projeto a ser seguido para montar o controle do Robô, sendo o M os motores e F a bateria.
No decorrer do circuito haverá chaves liga e desliga e chaves com três posições que fará com que o carrinho pare, ande, ou de a ré.
domingo, 11 de agosto de 2019
Sábado dia 10 de agosto foi realizada a competição de lançamento de foguetes. No dia antes da competição foi realizado três testes, em dois deles o paraquedas falhou devido a falha no acionamento do paraquedas, mas o terceiro foi bem sucedido.
Na competição era permitido apenas três lançamentos, que no 1º lançamento atingiu a marca dos 3,79 segundos. No 2º lançamento atingiu a marca de 4 segundos. Já no terceiro que foi usado um paraquedas fornecido por outro grupo conseguiu-se atingir 4,53 segundos, assim então finalizando a comepetição em 10° lugar. No placar da sala terminou-se em 2º lugar.
Agradecimentos ao grupo 5 do 3°B por nos fornecer o paraquedas extra no grupo.
Na competição era permitido apenas três lançamentos, que no 1º lançamento atingiu a marca dos 3,79 segundos. No 2º lançamento atingiu a marca de 4 segundos. Já no terceiro que foi usado um paraquedas fornecido por outro grupo conseguiu-se atingir 4,53 segundos, assim então finalizando a comepetição em 10° lugar. No placar da sala terminou-se em 2º lugar.
Agradecimentos ao grupo 5 do 3°B por nos fornecer o paraquedas extra no grupo.
sexta-feira, 9 de agosto de 2019
Lançamento de projéteis
Se você atirasse uma pedra com um determinado ângulo com ausência de força gravitacional ela seguiria uma trajetória retilínea uniforme. Porém, se adicionarmos uma força gravitacional observaremos um movimento uniformemente variado. Qualquer objeto lançado por algum meio e que segue em movimento por sua própria inércia é chamado de projétil.
A componente horizontal do movimento de um projétil é como o movimento horizontal de uma bola de boliche que rola ao longo da pista sem o efeito retardador do atrito, ou seja, sua velocidade é constante. A componente vertical de um projétil sofre a ação da aceleração gravitacional, ou seja, a velocidade varia em função do tempo. Se tomarmos como sentido positivo da trajetória para cima, logo, se um projétil estiver se movimentando para cima, sua velocidade será positiva indicada pelo sentido positivo, porém a aceleração da gravidade será negativa, pois sua ação é oposta ao sentido positivo. Ainda quando esse mesmo projétil estiver se movimento para baixo, sua velocidade será negativa, pois é oposta ao sentido positivo. O sinal da velocidade diz respeito apenas ao sentido do projétil em sua trajetória.
A trajetória curvilínea de um projétil é uma combinação do movimento horizontal com o movimento vertical. As componentes verticais e horizontais de projéteis são independente uma da outra, ou seja, movimento horizontal não afeta o movimento vertical. Esta propriedade permite decompor um problema que envolve um movimento bidimensional em dois problemas unidimensionais independentes, um para o movimento horizontal e outro para o movimento vertical.
Lançamento oblíquo
O lançamento oblíquo trate-se de um projétil lançado em um determinado ângulo. Um bom exemplo para lançamento oblíquo é um é o lançamento de foguete de garrafa PET, o foguete é disparado com uma velocidade inicial em um determinado ângulo seguindo o movimento de sua própria inércia, tanto no eixo horizontal quanto no eixo vertical, porém no eixo vertical ele sofre a ação da gravidade.
Fonte: https://sites.google.com/site/ifscastronomia/foguete-de-garrafa-pet
Se você atirasse uma pedra com um determinado ângulo com ausência de força gravitacional ela seguiria uma trajetória retilínea uniforme. Porém, se adicionarmos uma força gravitacional observaremos um movimento uniformemente variado. Qualquer objeto lançado por algum meio e que segue em movimento por sua própria inércia é chamado de projétil.
A componente horizontal do movimento de um projétil é como o movimento horizontal de uma bola de boliche que rola ao longo da pista sem o efeito retardador do atrito, ou seja, sua velocidade é constante. A componente vertical de um projétil sofre a ação da aceleração gravitacional, ou seja, a velocidade varia em função do tempo. Se tomarmos como sentido positivo da trajetória para cima, logo, se um projétil estiver se movimentando para cima, sua velocidade será positiva indicada pelo sentido positivo, porém a aceleração da gravidade será negativa, pois sua ação é oposta ao sentido positivo. Ainda quando esse mesmo projétil estiver se movimento para baixo, sua velocidade será negativa, pois é oposta ao sentido positivo. O sinal da velocidade diz respeito apenas ao sentido do projétil em sua trajetória.
A trajetória curvilínea de um projétil é uma combinação do movimento horizontal com o movimento vertical. As componentes verticais e horizontais de projéteis são independente uma da outra, ou seja, movimento horizontal não afeta o movimento vertical. Esta propriedade permite decompor um problema que envolve um movimento bidimensional em dois problemas unidimensionais independentes, um para o movimento horizontal e outro para o movimento vertical.
Lançamento oblíquo
O lançamento oblíquo trate-se de um projétil lançado em um determinado ângulo. Um bom exemplo para lançamento oblíquo é um é o lançamento de foguete de garrafa PET, o foguete é disparado com uma velocidade inicial em um determinado ângulo seguindo o movimento de sua própria inércia, tanto no eixo horizontal quanto no eixo vertical, porém no eixo vertical ele sofre a ação da gravidade.
Fonte: https://sites.google.com/site/ifscastronomia/foguete-de-garrafa-pet
Correção:
O maior problema que houve no grupo neste trabalho foi a dificuldade de organizar um encontro para que fizesse testes do foguete e possíveis correções, como ocorreu com diversos paraquedas feito pelo grupo no qual estava grande demais e não abria no alto para segurar o foguete. O problema com o paraquedas foi resolvido diminuindo o seu tamanho e assim quando dobrado seu volume ficara menor, assim então ficando fácil sua ativação no alto.
O maior problema que houve no grupo neste trabalho foi a dificuldade de organizar um encontro para que fizesse testes do foguete e possíveis correções, como ocorreu com diversos paraquedas feito pelo grupo no qual estava grande demais e não abria no alto para segurar o foguete. O problema com o paraquedas foi resolvido diminuindo o seu tamanho e assim quando dobrado seu volume ficara menor, assim então ficando fácil sua ativação no alto.
sexta-feira, 2 de agosto de 2019

Devido a alguns problemas durante o processo de bombeamento de pressão para dentro do foguete o gatilho acabava descendo sozinho, assim então o grupo decidiu melhorar a trava. Para isso foi feito esse modelo usando duas hastes de aço de 50 cm cada e envergada para que tomasse o formato como o da foto acima. Em seguida foi colocado parafusos no cano que prende o foguete no lugar (faça escolhas de parafusos curtos para que não vare o cano e atrapalhe a decida da peça durante o acionamento da alavanca ou corda) e usou-se no final borrachas de garrote para manter a peça esticada para cima (OBS: não deixar muito tensionado, mas também não sem o tensionamento). Após prender usando algumas fitas “enforca gato” foi revestido com câmara de bicicleta as extremidades para que ninguém se machucasse e também para que a borracha não saísse do lugar. Assim com um leve empurrão na alavanca o foguete é disparado.
Depois de feito o 27º lançamento com todos os foguetes feitos tendo as aletas partidas o grupo constatou que:
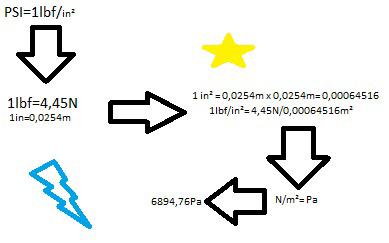
A pressão colocada dentro da garrafa era muito alta, 110 PSi, o que na saída ocorresse o aumento da resistência do ar, assim quebrando as aletas.
O melhor material encontrado para montar as aletas foi um EVA de espessura média.
Uma pressão de 40 PSi foi um lançamento excelente. No primeiro lançamento feito pelo grupo o foguete não usou paraquedas, assim alcançando uma grande altitude. No teste usando o paraquedas usando a mesma pressão o foguete subiu muito baixo pois o paraquedas abriu durante a subida. Para isso a pressão ideal encontrada foi usar 60 PSi para que compensasse o peso do paraquedas.
OBS: A maioria dos lançamentos o foguete não se saiu muito bem devido aos diversos problemas encontrados como as aletas que quebravam e o excesso de pressão dentro da garrafa.
terça-feira, 25 de junho de 2019
O teste realizado com o foguete hoje houve um problema no primeiro lançamento ao abrir o paraquedas e alcançou o tempo de 3,06 segundos no ar.
No segundo lançamento o paraquedas abriu alcançando 5,36 segundos no ar. (Obs: o foguete não subiu muito alto devido ao peso do paraquedas, e durante sua subida o paraquedas abriu antes assim não deixando ele subir muito alto.)
No segundo lançamento o paraquedas abriu alcançando 5,36 segundos no ar. (Obs: o foguete não subiu muito alto devido ao peso do paraquedas, e durante sua subida o paraquedas abriu antes assim não deixando ele subir muito alto.)

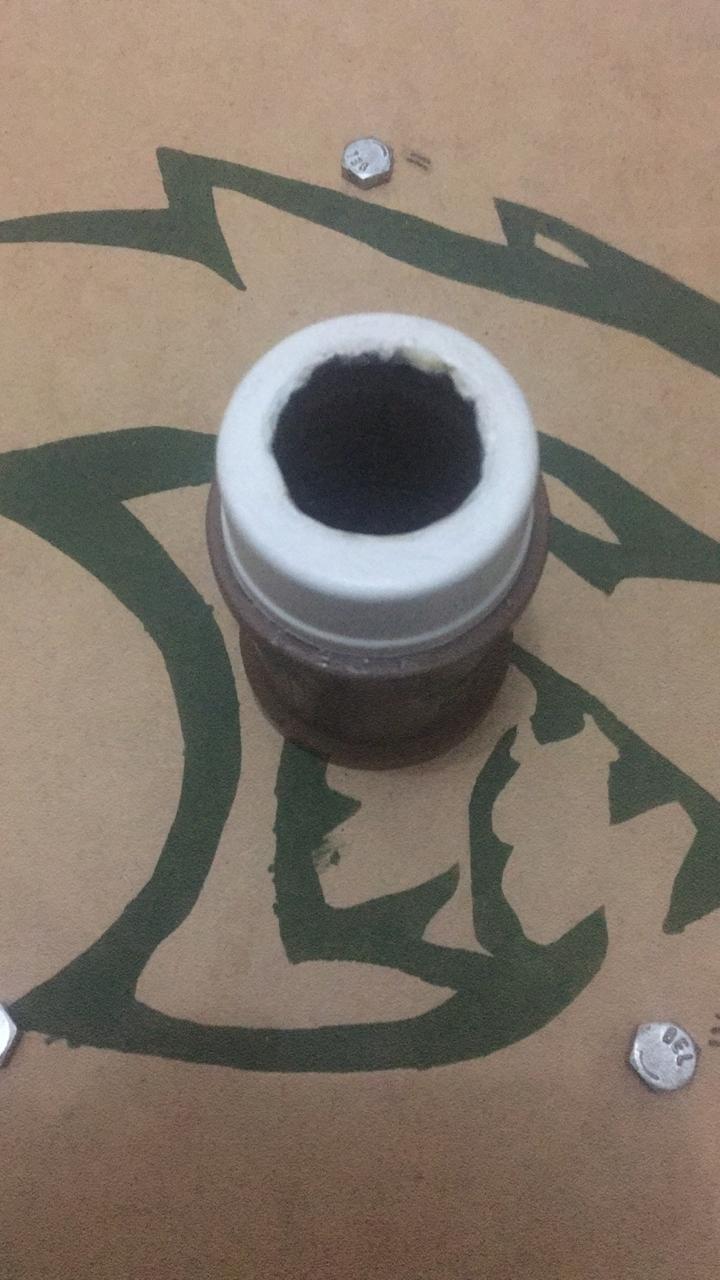
Feito o 15º teste a válvula de ar usada no projeto acabou por estourar devido à alta pressão inserida no sistema (estourou por volta de 80 Psi).
Assim fomos forçados a pensar em uma alternativa diferente para a válvula, sendo comprada assim uma válvula de ferro por inteiro como mostrada na imagem:

E assim compramos uma opção reserva que é uma válvula genérica comumente usada em pneu de carro.

E pensamos na solução do problema caso ele repita, usamos as mesmas técnicas usadas para a junção de outras peças na base. Foram utilizados:
1 cano de PVC de 20 mm de 3 cm de comprimento
1 quepe de PVC de 20 mm
1 adaptador de PVC solda/rosca de 20 x 1/2”

Após a furação do quepe para a passagem da válvula cole-a no adaptador usando a mesma técnica da imagem.

Na base entrou-se uma luva de redução de PVC solda/rosca de 1/2” x 20

No fim, após a alteração, a base ficará assim.

Válvulas feita pelo grupo.
sábado, 1 de junho de 2019
Personalização da base de lançamento. Apenas melhorias estéticas

As peças foram separadas para que fosse passada algumas camadas de tinta prime para a preparação da superfície. Foram usadas tintas automotivas de cor preta e vermelha, sendo o vermelho para destacar partes importantes na hora do lançamento.
As tintas foram diluídas em tíner até ficar uma mistura homogênea e textura leitosa, e depois colocado na bomba fritz (pulverizador vertical) para que fosse realizada a pintura.
Durante a pintura a tinta que fora preparada não foi o suficiente para a pintura completa da base, portanto, certifique-se de que haverá tíner o suficiente para qualquer emergência do tipo.

A base finalmente terminada e testada, lembrando que a pintura foi feita apenas para fins estéticos.
*Lembre-se de cobrir cada parte que não deseja pintar para que seja realizada a pintura. Durante o processo use máscara e óculos por segurança.

As peças foram separadas para que fosse passada algumas camadas de tinta prime para a preparação da superfície. Foram usadas tintas automotivas de cor preta e vermelha, sendo o vermelho para destacar partes importantes na hora do lançamento.
As tintas foram diluídas em tíner até ficar uma mistura homogênea e textura leitosa, e depois colocado na bomba fritz (pulverizador vertical) para que fosse realizada a pintura.
Durante a pintura a tinta que fora preparada não foi o suficiente para a pintura completa da base, portanto, certifique-se de que haverá tíner o suficiente para qualquer emergência do tipo.

A base finalmente terminada e testada, lembrando que a pintura foi feita apenas para fins estéticos.
*Lembre-se de cobrir cada parte que não deseja pintar para que seja realizada a pintura. Durante o processo use máscara e óculos por segurança.
Alavanca do gatilho de lançamento
Material usado
Papelão
Parafusos porcas e arruelas
Cabo de guarda chuva
Conduite de freio de bicicleta
Arame de aço de cerca elétrica
Cola quente
Mola

Parafusos usados para prender a tampa da caixa

O sistema interno foi construído e pensado na alavanca sendo empurrada para a frente para que o foguete seja lançado, o projeto foi totalmente reforçado com cola quente e papelão. A mola existe no sistema para forçar a alavanca a retornar para a posição inicial assim facilitando o próximo lançamento no qual terá de puxar a extremidade do arame presa a base para que recarregue o sistema.

Alavanca pronta e fechada após ter sido testada. A alavanca se saiu muito bem no teste uma vez que não haverá um certo tranco como há a corda e uma pessoa puxando-a, assim não terá o risco da base tombar para o com o foguete prestes a ser lançado.

Alavanca pronta e personalizada
Material usado
Papelão
Parafusos porcas e arruelas
Cabo de guarda chuva
Conduite de freio de bicicleta
Arame de aço de cerca elétrica
Cola quente
Mola
{kind=link}

Parafusos usados para prender a tampa da caixa

O sistema interno foi construído e pensado na alavanca sendo empurrada para a frente para que o foguete seja lançado, o projeto foi totalmente reforçado com cola quente e papelão. A mola existe no sistema para forçar a alavanca a retornar para a posição inicial assim facilitando o próximo lançamento no qual terá de puxar a extremidade do arame presa a base para que recarregue o sistema.

Alavanca pronta e fechada após ter sido testada. A alavanca se saiu muito bem no teste uma vez que não haverá um certo tranco como há a corda e uma pessoa puxando-a, assim não terá o risco da base tombar para o com o foguete prestes a ser lançado.

Alavanca pronta e personalizada
quarta-feira, 22 de maio de 2019
Santos Dumont
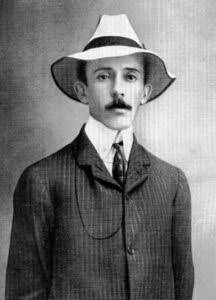 Santos Dumont foi um inventor Brasileiro, famoso por ter criado os primeiros balões dirigíveis movidos a motor com gasolina e o primeiro avião do mundo, titulo esse que ele divide com os irmãos Wright.
Santos Dumont foi um inventor Brasileiro, famoso por ter criado os primeiros balões dirigíveis movidos a motor com gasolina e o primeiro avião do mundo, titulo esse que ele divide com os irmãos Wright.
Santos Dumont fez o 14-bis ou "Ave de Rapina I", originalmente o 14-bis estaria acoplado a um balão para facilitar a decolagem, porém isso gerava muita força de arrasto pelo ar, que fez o avião perder velocidade e Dumont desacoplar o balão ao 14-bis, o avião voou sem o balão, porém não tinha estabilidade.
Mais tarde, Dumont instalou o motor náutico Antoinette de 50 cavalos a vapor no lugar do antigo que era movido a 24 cavalos a vapor e assim conseguiu o salto de 11 metros em 13 de Setembro de 1906, porém, o pouso foi desastroso, impossibilitando o avião de voar novamente.
Santos Dumont modificou o avião mais uma vez, retirou a roda traseira, cortou a estrutura portadora da hélice e envernizou a seda das asas, nascendo assim o "Ave de Rapina II", percorrendo 60 metros em 7 segundos a uma altura de dois metros em 23 de Outubro de 1906, feito esse que lhe deu o titulo de pai da aviação, já que dentre as mais de mil pessoas que estavam assistindo, a Comissão Oficial de Aeroclube da França estava presente e documentou o feito, mas mesmo assim o pouso continuava desastroso devido a falta de controle do avião, danificando as rodas traseiras do avião.
Em 12 de Novembro do mesmo ano, Dumont projetou o "Ave de Rapina III" que possuia ailerons para ajudar no controle durante o voo, realizou testes novamente, e conseguiu percorrer 220 metros em 21,5 segundos, estabelecendo o recorde da época, esse feito foi registrado pelo Aeroclube da França e eternizado em forma de monumento localizado no campo de Bagatelle.
Mesmo assim, o 14-bis continuava com problemas de estabilidade, e em 14 se abril de 1907 após mais testes para estabilizar a aeronave, o avião bateu e em vez de continuar o projeto, Dumont re-utilizou suas peças em outros projetos.
Dois inventores americanos, chamados Wilbur e Orville Wright, são considerados, nos Estados Unidos e em alguns outros países, os idealizadores, construtores e pilotos do primeiro avião. Os irmãos Wright realizaram seu primeiro voo de avião bem-sucedido em 1903. Até hoje algumas características de seus projetos são usadas na fabricação de aviões modernos.
No Brasil, na França e em alguns outros países, se considera que o brasileiro Alberto Santos Dumont foi o inventor do dirigível e do avião, por isso ele é conhecido como Pai da Aviação. Argumenta-se que o avião dos irmãos Wright não teria alçado voo apenas com o impulso de seu motor, mas com o apoio de uma catapulta.
Irmãos Wright
 Wilbur e Orville eram filhos de um pastor cristão. Wilbur nasceu perto de Millville, em Indiana, em 16 de abril de 1867, e Orville nasceu em Dayton, em Ohio, em 19 de agosto de 1871.
Wilbur e Orville eram filhos de um pastor cristão. Wilbur nasceu perto de Millville, em Indiana, em 16 de abril de 1867, e Orville nasceu em Dayton, em Ohio, em 19 de agosto de 1871.
Quando jovens, os irmãos Wright consertavam bicicletas. Em 1896, começaram a se interessar por planadores. O planador é uma aeronave com asas fixas que não tem motor. O fluxo do vento passando pelas asas é que mantém o planador flutuando no ar.
Em 1900, os irmãos Wright começaram a testar planadores perto de Kitty Hawk, uma cidade da Carolina do Norte. As dunas de areia favoreciam os voos experimentais: os ventos das montanhas facilitavam as subidas e a areia das dunas tornava as aterrissagens mais seguras. Os irmãos Wright testaram diferentes tipos de asas e de sistemas de controle.
Os Wright testaram a aeronave nas montanhas de Kill Devil, perto de Kitty Hawk. Segundo relatos posteriores, nesse lugar, no dia 17 de dezembro de 1903, Orville realizou seu primeiro voo, percorrendo 37 metros em 12 segundos. Pouco depois, Wilbur fez um voo de 260 metros em 59 segundos. A propulsão teria ocorrido por meio de uma catapulta, segundo alguns estudiosos, porém é difícil afirmar com certeza, uma vez que não houve testemunhas desses voos.
Os Wright continuaram a aprimorar seu invento. Em 1905, conseguiram permanecer no ar por cerca de 40 minutos.
Em 1908, os Wright venderam um avião ao exército americano e começaram a exibir seu produto nos Estados Unidos e na Europa, ganhando fama rapidamente.
Em 1909, fundaram a Companhia Wright, para fabricar aviões em Dayton. A empresa tinha seu próprio campo de pouso e uma escola de pilotagem.
Em 1910, os irmãos criaram também uma companhia de exibições, que contratava pilotos de avião para fazer acrobacias para o público. A companhia foi fechada em 1911, depois que vários pilotos morreram em desastres aéreos.
Wilbur morreu em Dayton, em consequência de uma doença, no dia 30 de maio de 1912. Depois da morte de Wilbur, Orville dirigiu sozinho a Companhia Wright até vendê-la, em 1915. Ele continuou trabalhando como inventor até morrer de um ataque cardíaco, em 30 de janeiro de 1948, em Dayton.
Conclusão:
O avião dos irmãos Wright é o que mais se assemelha com o modelo de avião que usamos atualmente, ao contrário do modelo de Santos Drummond. As regras do Aeroclube da França da época exigia que para ganhar a alcunha de primeira máquina mais pesada que o ar, essa deveria ser sem auxílios, regra que os Wright não cumpriram, porém, apesar de Santos Drummond cumprir todas as exigências do Aeroclube da França, o 14-bis se comportava mais como um balão do que como um avião enquanto o dos irmãos americanos conseguia realizar manobras em formato de oito.
Portanto, a primeira máquina mais pesada que o ar que levantou vôo foi o 14-bis mas o primeiro avião como conhecemos a ser contruido e levantar vôo foi o Flyer. Ambos tiveram importância ímpar na história da aviação e merecem seus devidos méritos, mas é importante enfatizar que o sonho de voar sempre esteve presente na humanidade, desde os gregos com o mito de ícaro e os chineses com a pipa até projetos de helicópteros feitos por Leonardo da Vinci.
Fontes:
https://www.hipercultura.com/santos-dumont-ou-irmaos-wright/
http://guiadolitoral.uol.com.br/materias/afinal_quem_inventou_o_aviao-3838-2016.shtml
https://www.ebiografia.com/santos_dumont/
https://brasilescola.uol.com.br/biografia/alberto-santos-dumont.htm
https://escola.britannica.com.br/artigo/irm%C3%A3os-Wright/482887
https://www.ebiografia.com/irmaos_wright/

Santos Dumont fez o 14-bis ou "Ave de Rapina I", originalmente o 14-bis estaria acoplado a um balão para facilitar a decolagem, porém isso gerava muita força de arrasto pelo ar, que fez o avião perder velocidade e Dumont desacoplar o balão ao 14-bis, o avião voou sem o balão, porém não tinha estabilidade.
Mais tarde, Dumont instalou o motor náutico Antoinette de 50 cavalos a vapor no lugar do antigo que era movido a 24 cavalos a vapor e assim conseguiu o salto de 11 metros em 13 de Setembro de 1906, porém, o pouso foi desastroso, impossibilitando o avião de voar novamente.
Santos Dumont modificou o avião mais uma vez, retirou a roda traseira, cortou a estrutura portadora da hélice e envernizou a seda das asas, nascendo assim o "Ave de Rapina II", percorrendo 60 metros em 7 segundos a uma altura de dois metros em 23 de Outubro de 1906, feito esse que lhe deu o titulo de pai da aviação, já que dentre as mais de mil pessoas que estavam assistindo, a Comissão Oficial de Aeroclube da França estava presente e documentou o feito, mas mesmo assim o pouso continuava desastroso devido a falta de controle do avião, danificando as rodas traseiras do avião.
Em 12 de Novembro do mesmo ano, Dumont projetou o "Ave de Rapina III" que possuia ailerons para ajudar no controle durante o voo, realizou testes novamente, e conseguiu percorrer 220 metros em 21,5 segundos, estabelecendo o recorde da época, esse feito foi registrado pelo Aeroclube da França e eternizado em forma de monumento localizado no campo de Bagatelle.
Mesmo assim, o 14-bis continuava com problemas de estabilidade, e em 14 se abril de 1907 após mais testes para estabilizar a aeronave, o avião bateu e em vez de continuar o projeto, Dumont re-utilizou suas peças em outros projetos.
Dois inventores americanos, chamados Wilbur e Orville Wright, são considerados, nos Estados Unidos e em alguns outros países, os idealizadores, construtores e pilotos do primeiro avião. Os irmãos Wright realizaram seu primeiro voo de avião bem-sucedido em 1903. Até hoje algumas características de seus projetos são usadas na fabricação de aviões modernos.
No Brasil, na França e em alguns outros países, se considera que o brasileiro Alberto Santos Dumont foi o inventor do dirigível e do avião, por isso ele é conhecido como Pai da Aviação. Argumenta-se que o avião dos irmãos Wright não teria alçado voo apenas com o impulso de seu motor, mas com o apoio de uma catapulta.
Irmãos Wright
 Wilbur e Orville eram filhos de um pastor cristão. Wilbur nasceu perto de Millville, em Indiana, em 16 de abril de 1867, e Orville nasceu em Dayton, em Ohio, em 19 de agosto de 1871.
Wilbur e Orville eram filhos de um pastor cristão. Wilbur nasceu perto de Millville, em Indiana, em 16 de abril de 1867, e Orville nasceu em Dayton, em Ohio, em 19 de agosto de 1871.Quando jovens, os irmãos Wright consertavam bicicletas. Em 1896, começaram a se interessar por planadores. O planador é uma aeronave com asas fixas que não tem motor. O fluxo do vento passando pelas asas é que mantém o planador flutuando no ar.
Em 1900, os irmãos Wright começaram a testar planadores perto de Kitty Hawk, uma cidade da Carolina do Norte. As dunas de areia favoreciam os voos experimentais: os ventos das montanhas facilitavam as subidas e a areia das dunas tornava as aterrissagens mais seguras. Os irmãos Wright testaram diferentes tipos de asas e de sistemas de controle.
Os Wright testaram a aeronave nas montanhas de Kill Devil, perto de Kitty Hawk. Segundo relatos posteriores, nesse lugar, no dia 17 de dezembro de 1903, Orville realizou seu primeiro voo, percorrendo 37 metros em 12 segundos. Pouco depois, Wilbur fez um voo de 260 metros em 59 segundos. A propulsão teria ocorrido por meio de uma catapulta, segundo alguns estudiosos, porém é difícil afirmar com certeza, uma vez que não houve testemunhas desses voos.
Os Wright continuaram a aprimorar seu invento. Em 1905, conseguiram permanecer no ar por cerca de 40 minutos.
Em 1908, os Wright venderam um avião ao exército americano e começaram a exibir seu produto nos Estados Unidos e na Europa, ganhando fama rapidamente.
Em 1909, fundaram a Companhia Wright, para fabricar aviões em Dayton. A empresa tinha seu próprio campo de pouso e uma escola de pilotagem.
Em 1910, os irmãos criaram também uma companhia de exibições, que contratava pilotos de avião para fazer acrobacias para o público. A companhia foi fechada em 1911, depois que vários pilotos morreram em desastres aéreos.
Wilbur morreu em Dayton, em consequência de uma doença, no dia 30 de maio de 1912. Depois da morte de Wilbur, Orville dirigiu sozinho a Companhia Wright até vendê-la, em 1915. Ele continuou trabalhando como inventor até morrer de um ataque cardíaco, em 30 de janeiro de 1948, em Dayton.
Conclusão:
O avião dos irmãos Wright é o que mais se assemelha com o modelo de avião que usamos atualmente, ao contrário do modelo de Santos Drummond. As regras do Aeroclube da França da época exigia que para ganhar a alcunha de primeira máquina mais pesada que o ar, essa deveria ser sem auxílios, regra que os Wright não cumpriram, porém, apesar de Santos Drummond cumprir todas as exigências do Aeroclube da França, o 14-bis se comportava mais como um balão do que como um avião enquanto o dos irmãos americanos conseguia realizar manobras em formato de oito.
Portanto, a primeira máquina mais pesada que o ar que levantou vôo foi o 14-bis mas o primeiro avião como conhecemos a ser contruido e levantar vôo foi o Flyer. Ambos tiveram importância ímpar na história da aviação e merecem seus devidos méritos, mas é importante enfatizar que o sonho de voar sempre esteve presente na humanidade, desde os gregos com o mito de ícaro e os chineses com a pipa até projetos de helicópteros feitos por Leonardo da Vinci.
Fontes:
https://www.hipercultura.com/santos-dumont-ou-irmaos-wright/
http://guiadolitoral.uol.com.br/materias/afinal_quem_inventou_o_aviao-3838-2016.shtml
https://www.ebiografia.com/santos_dumont/
https://brasilescola.uol.com.br/biografia/alberto-santos-dumont.htm
https://escola.britannica.com.br/artigo/irm%C3%A3os-Wright/482887
https://www.ebiografia.com/irmaos_wright/
segunda-feira, 20 de maio de 2019

Mangueira de compressor a ar de 3 metros de comprimento que será usada como sistema de segurança para manter uma distância segura da base. Uma das extremidades está um bico presilha (peça que será conectada no bico de bicicleta na base) e na outra extremidade foi usado um bico de bicicleta retirada de uma câmara de ar de bicicleta. Use abraçadeiras para prender as peças em ambas as extremidades.
quarta-feira, 8 de maio de 2019
Roirá

Comece serrando um degrau da luva de 20 mm para que haja um encaixe para o gatilho que terá de subir, para assim travar a garrafa no devido lugar.


Lixe a peça para que haja um perfeito acabamento, assim não haverá nenhuma rebarba que poderá travar o gatilho na hora do lançamento.

Use o pedaço de PVC de 20 mm com 2,5 cm de comprimento para colocar do lado da liva que não foi modificado, e o de 8 cm no lado que foi modificado. Como mostra na figura acima.

Agora encaixe a união de mangueira com devido cuidado, usamos nessa parte cola de PVC junto com cola quente. Se for mal colocada pode acarretar em uma explosão da peça devido a pressão.

Depois de seco usamos cola de motor para moldar o formato de entrada da garrafa, demorou em torno de 2 semanas para secar a cola.
Depois de seca revista a cola de motor com veda rosca. Optamos por usar a opção da cola de motor pois o anel O’Ring estoura com muita facilidade com a pressão, e com a cola de motor moldando a entrada do gargalo da garrafa haverá um reforço maior para que a pressão continue dentro da garrafa.

Certo, nessa parte terá de se alinhar as fitas de nylon com muita atenção, pois se elas estiverem muito aglomeradas elas não prenderam corretamente a garrafa no lugar. Use a abraçadeira de mangueira e os elásticos para arrumar facilmente as fitas.

Para fazer a parte que irá disparar de vez o foguete use o cano de PVC de 40 mm de 4 cm de comprimento para juntar a luva de 40 mm com o cap de 40 mm.

Faça um furo no Cap para passar o cano 20 mm e corra livremente por ele.

Use o cano 32 mm para travar as abraçadeiras no lugar, em seguida insira ainda por baixo o cano de 25 mm. (Nessa parte terá de fazer muita força, recorra a ajuda de um martelo e cuidado com a união de mangueira na ponta) e depois corte o que restar na parte inferior das abraçadeiras de Nylon que sobrar, em seguida encaixe a luva unida com o cap.
Depois de fazer isso coloque então o adaptador de 20 mm com rosca no final do cano, ele será o encaixe para o resto da base.

Faça os movimentos com a peça que está solta no cano e veja se ela trava as fitas de nylon e segure uma garrafa, elas terão de formar a coroa na parte superior para que solte a garrafa quando a peça solta descer.

A base então ficará assim. O grupo ainda tem a intenção de personalizar a base com certas pinturas.
Comece serrando um degrau da luva de 20 mm para que haja um encaixe para o gatilho que terá de subir, para assim travar a garrafa no devido lugar.


Lixe a peça para que haja um perfeito acabamento, assim não haverá nenhuma rebarba que poderá travar o gatilho na hora do lançamento.

Use o pedaço de PVC de 20 mm com 2,5 cm de comprimento para colocar do lado da liva que não foi modificado, e o de 8 cm no lado que foi modificado. Como mostra na figura acima.

Agora encaixe a união de mangueira com devido cuidado, usamos nessa parte cola de PVC junto com cola quente. Se for mal colocada pode acarretar em uma explosão da peça devido a pressão.

Depois de seco usamos cola de motor para moldar o formato de entrada da garrafa, demorou em torno de 2 semanas para secar a cola.
Depois de seca revista a cola de motor com veda rosca. Optamos por usar a opção da cola de motor pois o anel O’Ring estoura com muita facilidade com a pressão, e com a cola de motor moldando a entrada do gargalo da garrafa haverá um reforço maior para que a pressão continue dentro da garrafa.

Certo, nessa parte terá de se alinhar as fitas de nylon com muita atenção, pois se elas estiverem muito aglomeradas elas não prenderam corretamente a garrafa no lugar. Use a abraçadeira de mangueira e os elásticos para arrumar facilmente as fitas.

Para fazer a parte que irá disparar de vez o foguete use o cano de PVC de 40 mm de 4 cm de comprimento para juntar a luva de 40 mm com o cap de 40 mm.
Faça um furo no Cap para passar o cano 20 mm e corra livremente por ele.

Use o cano 32 mm para travar as abraçadeiras no lugar, em seguida insira ainda por baixo o cano de 25 mm. (Nessa parte terá de fazer muita força, recorra a ajuda de um martelo e cuidado com a união de mangueira na ponta) e depois corte o que restar na parte inferior das abraçadeiras de Nylon que sobrar, em seguida encaixe a luva unida com o cap.
Depois de fazer isso coloque então o adaptador de 20 mm com rosca no final do cano, ele será o encaixe para o resto da base.

Faça os movimentos com a peça que está solta no cano e veja se ela trava as fitas de nylon e segure uma garrafa, elas terão de formar a coroa na parte superior para que solte a garrafa quando a peça solta descer.

A base então ficará assim. O grupo ainda tem a intenção de personalizar a base com certas pinturas.
Assinar:
Comentários (Atom)